机械工程学院曾达幸教授团队在机器人学领域TOP期刊IEEE Robotics and Automation Letters发表最新成果:Design of Human–Machine Compatible Ankle Rehabilitation Robot Based on Equivalent Human Ankle Model。燕山大学-东莞理工学院联合培养博士生刘亚为论文第一作者,曾达幸教授为通讯作者,东莞理工学院机械工程学院卢文娟副教授为共同作者。
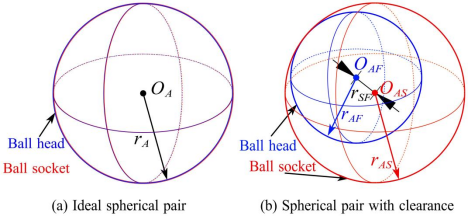
图1 等效人体踝关节模型
为了帮助有运动功能障碍的脑卒中患者恢复运动功能,提出了一种人机相容型踝关节康复机器人,其可以实现人体踝关节转动中心与踝关节康复机器人转动中心的实时重合。论文依次针对从“人体”、“人机”和“机器人”的角度开展研究:从“人体”的角度开展研究,提出了含间隙球面副等效人体踝关节模型和人体踝关节转动中心估计模型,并分析了人体踝关节转动中心的运动范围;从“人机”角度开展研究,为了得到人机相容型踝关节康复机器人的机械设计原则,对人机闭链模型进行了自由度和运动学分析;从“机器人”的角度开展研究,对3-RRCRR踝关节康复机器人进行了自由度、运动学和移动工作空间分析,以判断该踝关节康复机器人是否满足人机相容型踝关节康复机器人的机械设计原则。

图2 人机闭链模型

图3 人体踝关节转动中心和康复机器人转动中心移动工作空间对比
研究表明,人机相容型踝关节康复机器人的机械设计原则包括自由度、运动学独立性和移动工作空间三个要求,3-RRCRR踝关节康复机器人满足人机相容型踝关节康复机器人的机械设计原则,可以实现人体踝关节转动中心与踝关节康复机器人转动中心的实时重合。
论文链接:https://ieeexplore.ieee.org/document/10356755
(撰稿:刘亚,一审:曾达幸,二审:科研部成果管理科,三审:李长平)



